Research topics
-
Sensor fusion for UAV applications
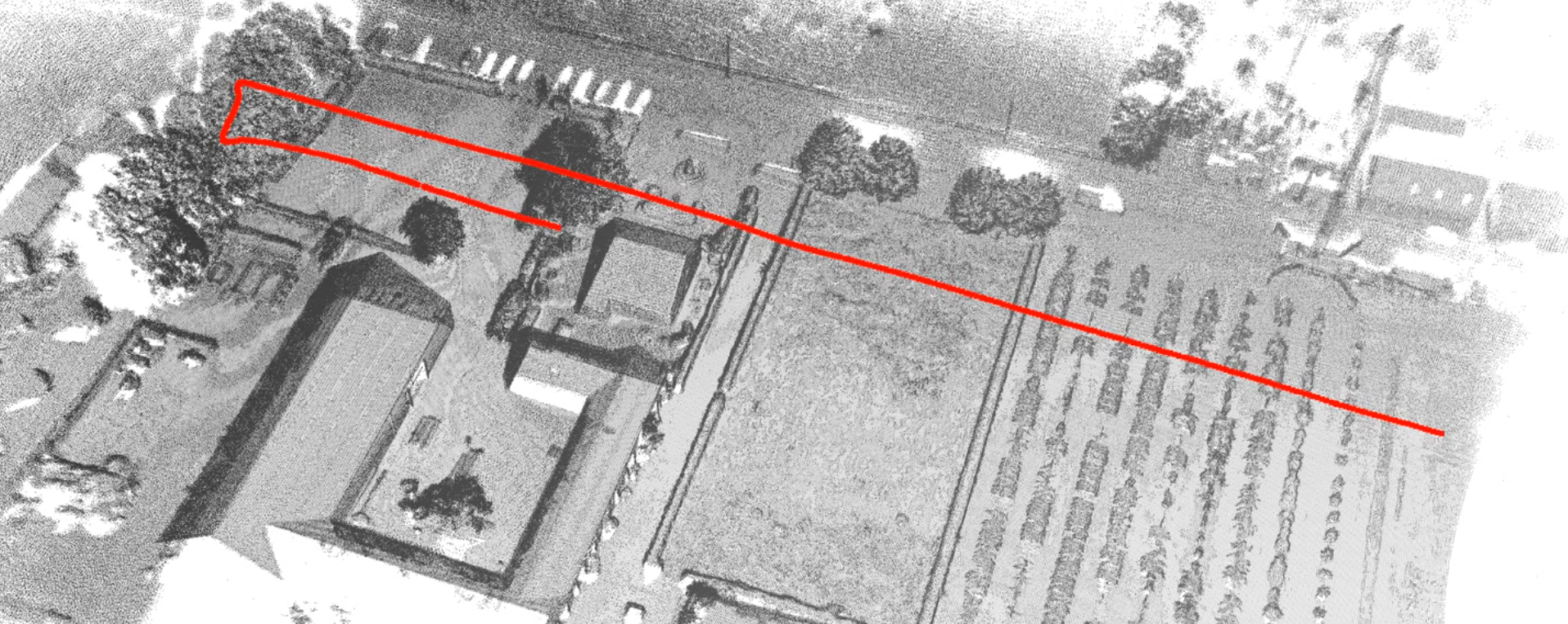
Within the UAV research centre, we are developing a multi-modal drone rig and processing pipeline consisting of a lidar scanner, multispectral camera, thermal camera and a high-end GNSS/INS system. It was developed to combine lidar scanning with traditional imaging (RGB, multispectral and thermal) and it will support several innovative UAV applications in the domains of precision agriculture and infrastructure inspection.
Read more
-
Indoor 3D mapping using LIDAR
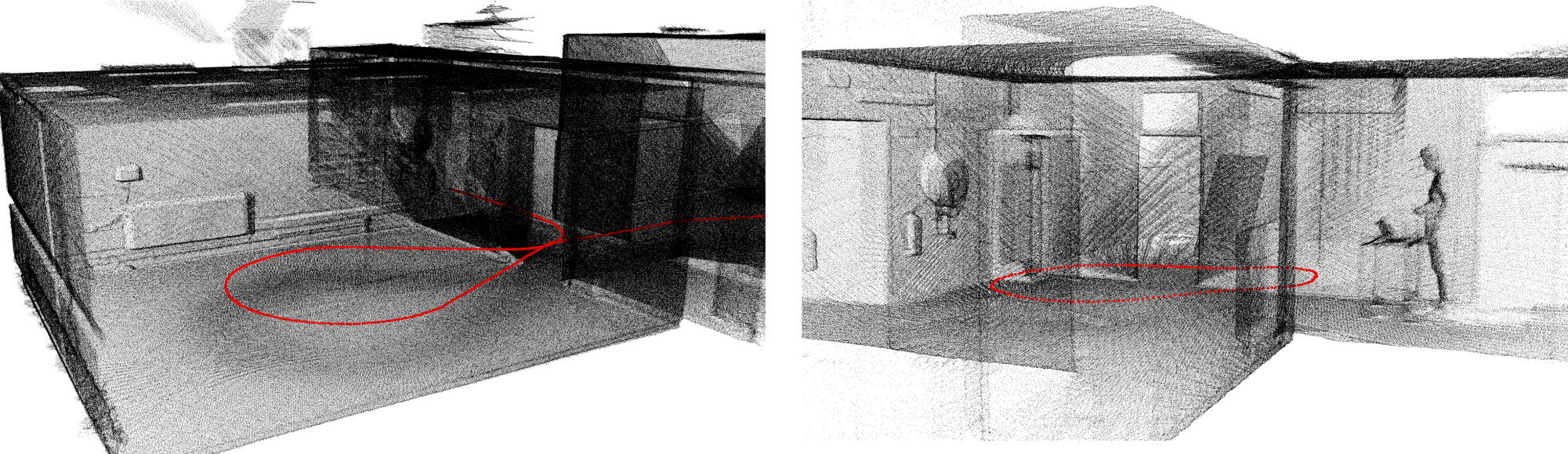
During my PhD I developed a system that is able to perform 3D mapping - and thus also 3D positioning - based on sensors that are able to perceive the environment, such as lidar scanners or time of flight cameras. In the scientific literature, this problem is also known as simultaneous localization and mapping or SLAM as it involves both the precise localization of the robot and the mapping of the environment at the same time.
Read more